Mr. Liu (M2)’s paper has been published on IEEE TIM (Transactions on Instrumentation and Measurement). In this study, we present a deep data-driven inertial measurement unit (IMU) online calibration (DUET) method that can compensate for the run-time errors of the accelerometer and gyroscope to improve inertial-based odometry.
https://ieeexplore.ieee.org/document/10225410
- Huakun Liu, Xin Wei, Monica Perusquía-Hernández, Naoya Isoyama, Hideaki Uchiyama, and Kiyoshi Kiyokawa
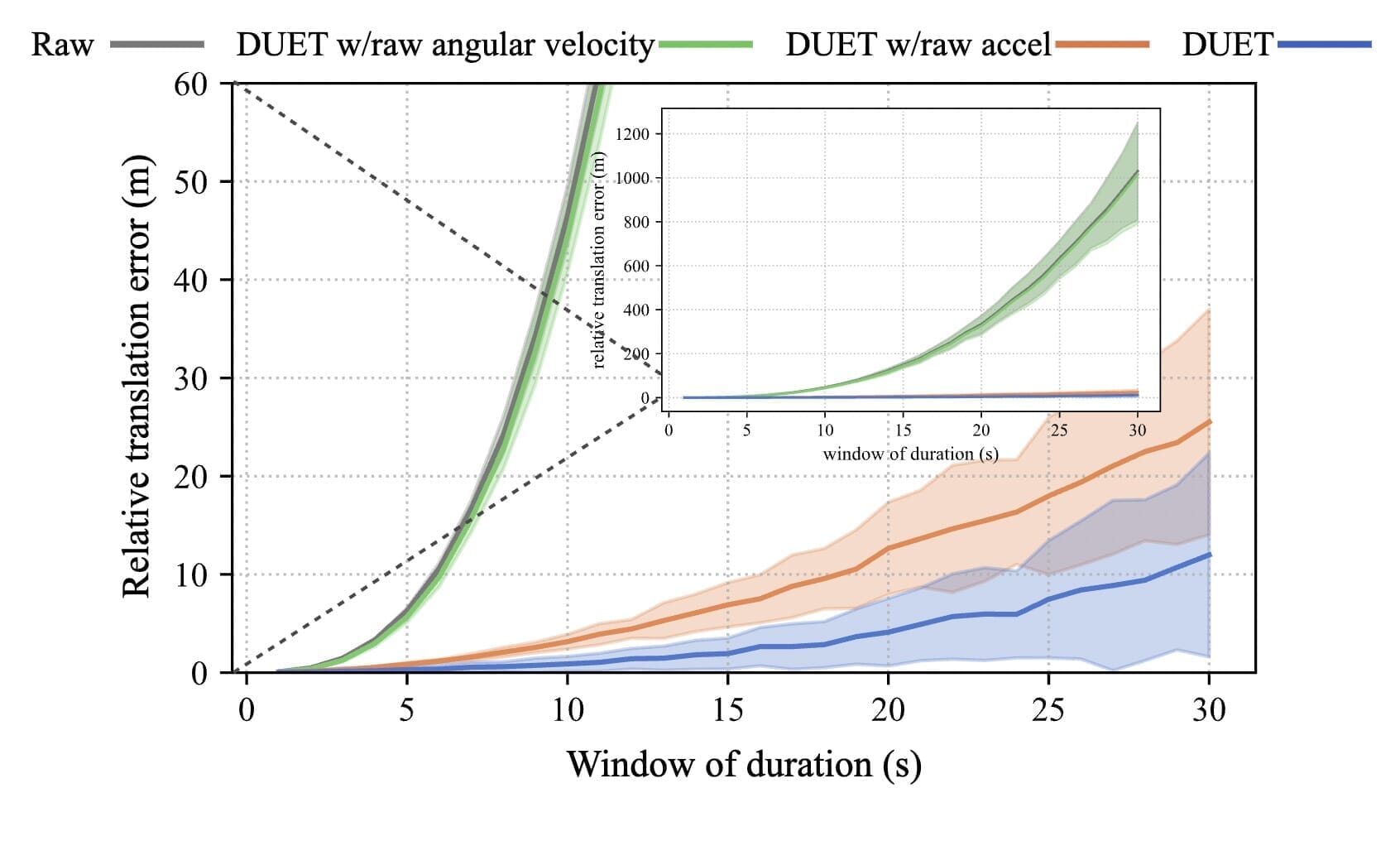
“DUET: Improving Inertial-Based Odometry via Deep IMU Online Calibration” - Abstract:
This article presents a deep data-driven inertial measurement unit (IMU) online calibration (DUET) method that can compensate for the run-time errors of the accelerometer and gyroscope to improve inertial-based odometry. We design a differential error learning strategy based on the kinematic motion model to train the sensor error compensation model. This strategy allows our method to learn IMU sensor errors, such as scale factors, axis misalignment, and biases, solely from displacement and orientation increments given by external tracking systems. Then, during the odometry computation, the trained model leverages the past inertial data to mitigate the sensor errors and thus reduces the integration errors to reflect the odometry state. The experiments conducted on two public visual–inertial datasets show an average of 20% improvement in the position estimation accuracy of visual–inertial odometry, which is comparable to existing learning-based methods with lower operational complexity.