We presented our work at CVPR 2025.
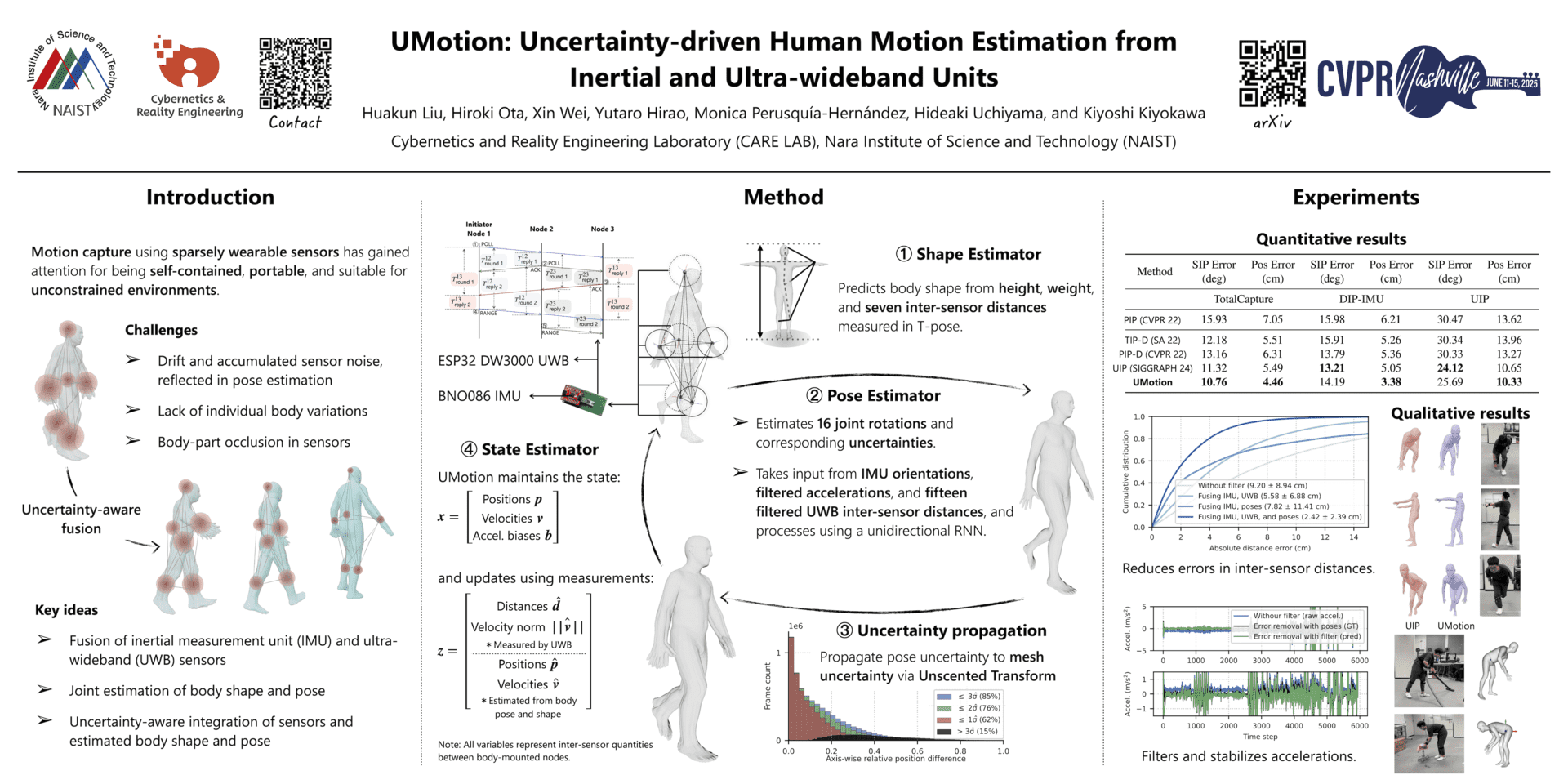
This research proposes a state estimation framework that tightly couples Inertial Measurement Units (IMUs) and Ultra-Wideband (UWB) sensors through an uncertainty-driven Unscented Kalman Filter (UKF), contributing to the realization of high-precision 3D human motion capture that is robust against body occlusion and data drift.
- Huakun Liu, Hiroki Ota, Xin Wei, Yutaro Hirao, Monica Perusquia-Hernandez, Hideaki Uchiyama, and Kiyoshi Kiyokawa, “UMotion: Uncertainty-driven Human Motion Estimation from Inertial and Ultra-wideband Units“, CVPR 2025, 2025