CVPR 2025 にて研究成果を発表しました。
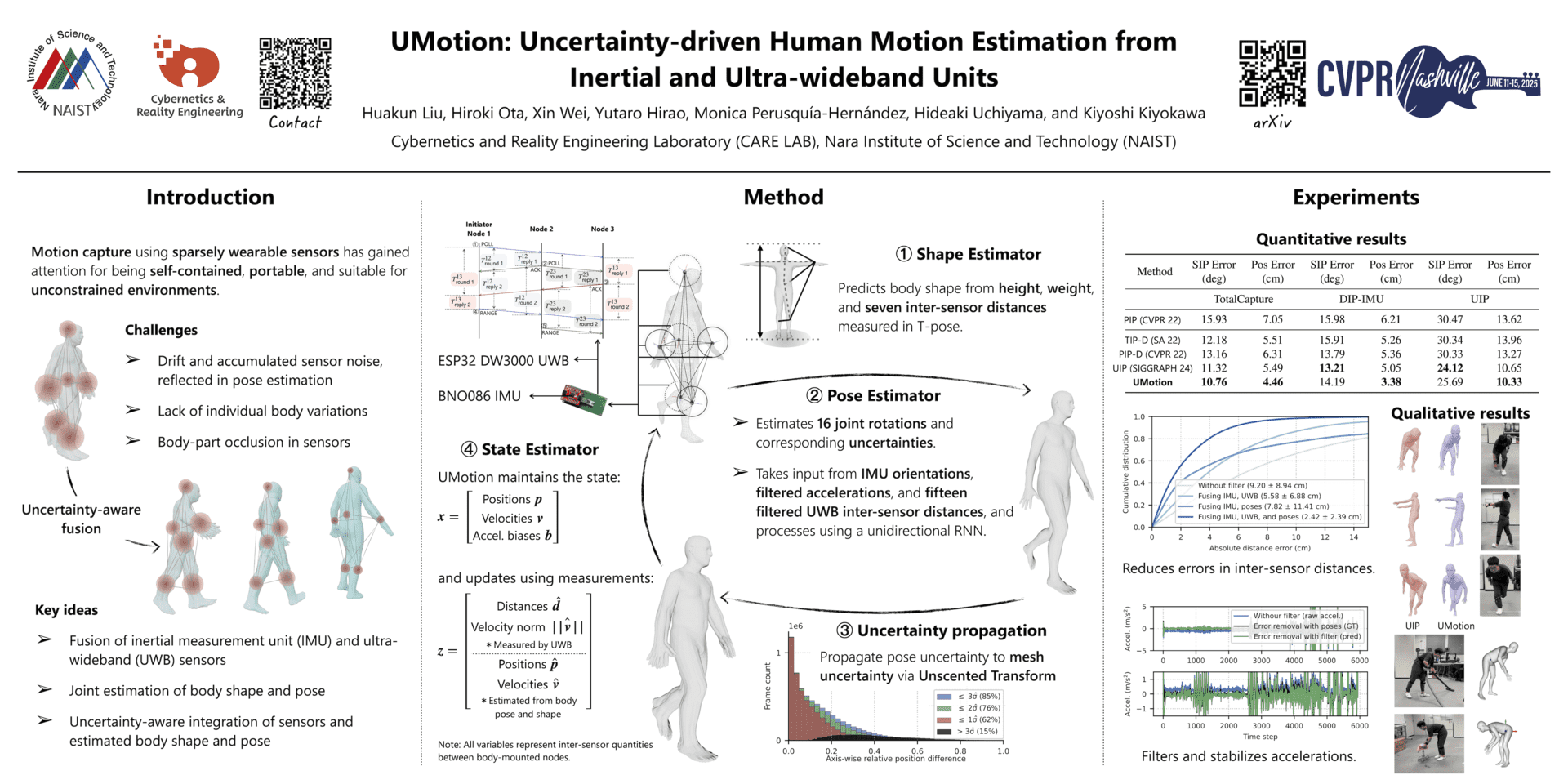
本研究は、慣性センサ(IMU)と超広帯域無線(UWB)を密結合(Tightly Coupled)させ、不確かさを考慮したUKF(アンセンテッドカルマンフィルタ)によって統合する状態推定フレームワークを提案するもので、身体遮蔽やドリフトに強い高精度な3Dヒューマンモーションキャプチャの実現に貢献します。
- Huakun Liu, Hiroki Ota, Xin Wei, Yutaro Hirao, Monica Perusquia-Hernandez, Hideaki Uchiyama, and Kiyoshi Kiyokawa, “UMotion: Uncertainty-driven Human Motion Estimation from Inertial and Ultra-wideband Units“, CVPR 2025, 2025