ユーザインタフェース分野のトップカンファレンスである the 37th Annual ACM Symposium on User Interface Software and Technology (UIST) が2024年10月13日から16日にかけて米国ピッツバーグで開催され、平尾助教が研究発表しました。これは当研究室東京大学の共同研究の成果です。
(Paper)
- Takeru Hashimoto and Yutaro Hirao,
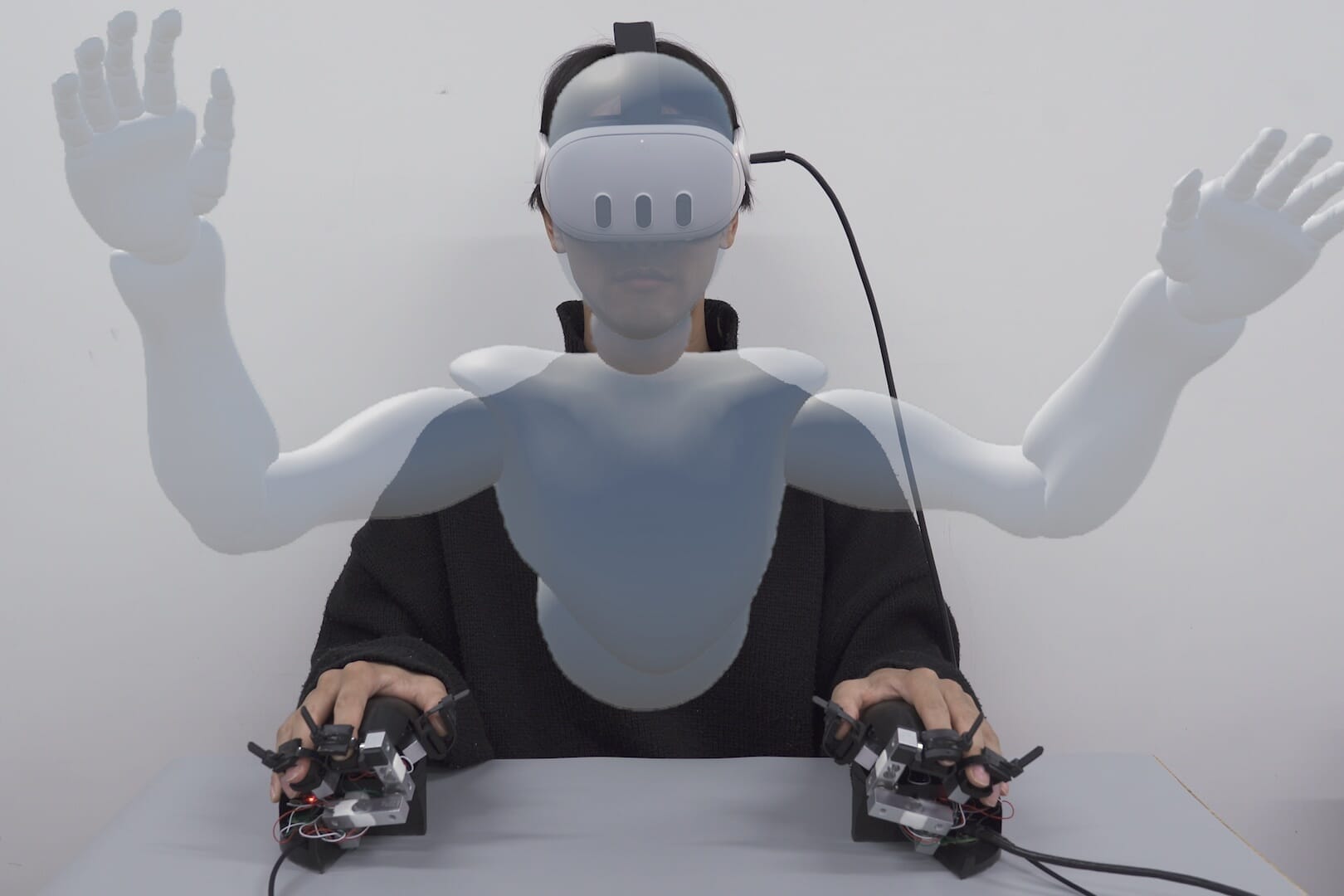
“Selfrionette: A Fingertip Force-Input Controller for Continuous Full-Body Avatar Manipulation and Diverse Haptic Interactions”
(Abstract): We propose Selfrionette, a controller that uses fingertip force input to drive avatar movements in virtual reality (VR). This system enables users to interact with virtual objects and walk in VR using only fingertip force, overcoming physical and spatial constraints. Additionally, by fixing users’ fingers, it provides users with counterforces equivalent to the applied force, allowing for diverse and wide dynamic range haptic feedback by adjusting the relationship between force input and virtual movement. To evaluate the effectiveness of the proposed method, this paper focuses on hand interaction as a first step. In User Study 1, we measured usability and embodiment during reaching tasks under Selfrionette, body tracking, and finger tracking conditions. In User Study 2, we investigated whether users could perceive haptic properties such as weight, friction, and compliance under the same conditions as User Study 1. Selfrionette was found to be comparable to body tracking in realism of haptic interaction, enabling embodied avatar experiences even in limited spatial conditions.
(Paper): https://doi.org/10.1145/3654777.3676409
(YouTube): https://www.youtube.com/watch?v=G5GIUYMuNXE
(Demo)
- Takeru Hashimoto and Yutaro Hirao,
“Demonstraion of Selfrionette: A Fingertip force to Avatar Motion and Diverse Haptics”
(Abstract): We propose Selfrionette, a controller that uses fingertip force input to drive avatar movements in virtual reality (VR). This system enables users to interact with virtual objects and walk in VR using only fingertip force, overcoming physical and spatial constraints. Additionally, by fixing users’ fingers, it provides users with counterforces equivalent to the applied force, allowing for diverse and wide dynamic range haptic feedback by adjusting the relationship between force input and virtual movement.